 |
 |
| Aus der Flugpraxis entwickelte theoretische Abhandlungen über: |
 |
|
|
|
|
|
|
|
|
|
 |
|
|
|
|
|
Die Fortbewegung eines Flugmodells im dreidimensionalen Raum erfolgt je nach Einsatz und Betrachtung höchst unterschiedlich. Jeder, der dabei in einer Zeiteinheit zurückgelegte Weg, Höhengewinn- oder Verlust, mit der gebräuchlichen Dimension (m/s), hat seine spezifische Benennung. Dieser Beitrag befasst sich neben einfachen Erläuterungen auch mit der Berechnung dieser Geschwindigkeiten, ohne und mit Antrieb. Das Verstehen der
Fluggeschwindigkeiten
ist bei der Abhandlung aerodynamischer oder flugmechanischer Probleme unumgänglich.
|
| Rechenbeispiele, weniger wichtige- oder Zusatzinformationen zum Hauptthema sind Kleingedruckt!
|
|
Zeichnung 1: zeigt die Fluggeschwindigkeiten von Flugmodellen ohne Antrieb mit den Grundbuchstaben v.
vx = Gleitfluggeschwindigkeit, vy = Sinkgeschwindigkeit, vsz end = Sturzflugendgeschwindigkeit, alle (m/s).
|
Legt ein Segler im Niedergleiten eine bestimmte Wegstrecke über Grund! pro Sekunde zurück, spricht man von der Gleitfluggeschwindigkeit vx (m/s). Die Berechnung erfolgt also nicht nach dem Gleitweg, sondern mit den zurückgelegten Metern über Grund.
|
|
Zeichnung 2:
Im Gleitflug sind folgende Bedingungen gegeben: das Gewicht G wirkt immer senkrecht zum Boden, der Auftrieb A senkrecht zur Flugbahn und der Widerstand W senkrecht zum Auftrieb A. Der Auftrieb verkleinert oder vergrößert sich also gegenüber G um den so entstehenden Winkel zwischen G und A, dem so genannten Gleitwinkel α.
|
| Der ist, wie aus dem unteren Kräfteparallelogramm ersichtlich: arc sin a = W / G und mit den in der Zeichnung benützten Werten meines Motorseglers 'mini-Re' ist er 0,032 / 0,507 = 3,6°. Nun erkennt man aber, dass auch A / G = cos α ist. Durch Umstellung erhält man die Gleichung für A. A = G * cos α = 0,507 * 0,998 = 0,506. A ist also gegenüber G nur um ein Tausendstel kleiner. Die Probe mit arc tg α = W / A = 0,032 / 0,506 = 3,6°, oder arc tg α = vy / vx = 3,6°.
|
Schon in den frühesten Forschungsergebnissen der Aerodynamik scheint die Formel für den Auftrieb A auf. Die Berechnung der Gleitfluggeschwindigkeit vx, sowie noch folgende, leiten sich von ihr ab. A = ca * ρ/2 * v² * F. Das gleiche gilt für den Widerstand W mit dem die Wertigkeit bestimmenden Beiwert cw. Darin ist ρ (Rho) die Luftdichte - sie beträgt in Bodennähe bei 15° C 1,225 kg/m³ - ca der gerade geflogene dimensionslose Auftriebsbeiwert und FF die Flügelfläche. Aus obiger Rechnung ist aber ersichtlich, dass Auftrieb und Gewicht fast gleich groß sind. Es ist daher in gewissen Gleitwinkelgrenzen durchaus vertretbar, A gleich G zu setzen. Stellt man nun die Formel für A nach v um, tritt in ihr anstelle von A/F die Flächenbelastung G/F mit der Kurzbezeichnung ρ und man erhält so die Formel für der Gleitfluggeschwindigkeit
Vx =√ 1,632 * (ρ / ca) (m/s)
Je geringer also die Flächenbelastung G/F und je größer der Auftriebsbeiwert ca, desto langsamer gleitet ein Flugmodell zu Boden. Bei umgekehrten Werten um so schneller.
|
Für die Berechnung von vx wieder ein Beispiel mit den Werten des Modells 'mini Re': bei einer Gewichtskraft von 4,97 N (0,507 kg * 9,81) und einer Flügelfläche von 0,287 m² ist die Flächenbelastung G/F = 17,31 N/m². Fliegt das Modell mit einem angenommenen ca von 0,9, ergibt sich nach obiger Formel eine Gleitfluggeschwindigkeit vx von 5,6 m/s.
|
 |
Zeichnung 3 stellt den Flug als eine Umsetzung von Fallenergie in eine Horizontalbewegung dar. Hat der Stein einen 'Gleitwinkel' von 0 / 1, ist jener des Modells 'mini Re' 16 : 1. Man nennt dieses Verhältnis Gleitzahl Ε und es sagt aus, dass 'mini RE' aus einem Meter Starthöhe bis zum Landepunkt 16 m über Grund zurücklegt. Definiert wird die Gleitzahl E als Verhältnis der zurückgelegten Wegstrecke pro Sekunde zum sekundlichen Höhenlust pro Meter. In der Zeichnung 2 ist links im Gleitdreieck auch erkennbar:
Ε = vx / vy = A / W = ca / cw = tg α.
Nach Umstellen der Formel von Ε erhält man vy = vx / Ε. Definiert in Worten: die Sinkgeschwindigkeit vy ist gleich Gleitfluggeschwindigkeit vx dividiert durch die Gleitzahl Ε. Die Gleitzahl ist aber auch gleichzeitig das Verhältnis von Auftrieb und Widerstand ca / cw (siehe Zeichnung 2). Daraus entsteht schließlich durch Zusammenlegung von vx und Ε die Formel:
Vy = √ 1,632 * p* (cw´² / ca³) (m/s)
Der dimensionslose Gesamtwiderstandsbeiwert cw´ setzt sich aus dem Profilwiderstand cwp, dem induzierten Widerstand cwi, dem Restwiderstand cwr und eventuell dem Bremsklappenwiderstand cwBK zusammen. Cw´ kann bei einem Normalsegler mit 0,06 eingesetzt werden.
|
Rechnet man mit den Werten der obigen vx - Berechnung mit p = 17,31 N/m², ca = 0,9 und für cw´= 0,06, dann ist vy = 0,373 m/s.
|
Je steiler der Gleitflug, um so mehr vermindert sich der Auftrieb A und desto mehr wächst der Widerstand W. Im senkrechten Sturzflug wird A schließlich 0 und der Widerstand erreicht seinen Höchstwert. Schließlich zerrt nur mehr das Gewicht G am Widerstand W. Die Sturzflugendgeschwindigkeit vSZ end' ist dann erreicht, wenn beim Anwachsen der Geschwindigkeit der Widerstand W so groß wird, bis er gleich dem Gewicht G ist. Für einen frei fallenden Körper gilt v = g * t und für den Weg des Höhenverlustes pro Sekunde s = g / 2* t² (g = Erdbeschleunigung = 9,81 m/s² und t die Zeit in Sekunden). Die Fallbeschleunigung wird also so lange mit dem Quadrat der Geschwindigkeit fortgesetzt, bis der Widerstand W des Modells gleich dem Gewicht G ist. Ab da bleibt die Geschwindigkeit konstant. In der Gleitflugformel tritt anstelle von ca der Beiwert cw´ und es ergibt sich für die Sturzflugendgeschwindigkeit:
VSZ end = √ 1,632 * (p / cw´) (m/s)
|
Bei Verwendung von Bremsklappen muss noch der Bremsklappenwiderstand beider Klappen cw BK zu cw´ addiert werden. Cw BK = cw * ( f /FF, f = Klappenfläche und FF = Flügelfläche (m²) ). Bei Bremsklappen setzt man je nach Bremsklappenform für cw 1,2 - 1,6 ein (1,6 bei vollem Querschnitt, 1,2 bei einer Form, die es der Strömung ermöglicht, unterhalb der Bremsklappen, an der Flügeloberfläche durchzufließen). Wäre f = 0,01 m², F = 0,5 m² und cw = 1,6, dann ist cw BK = 0,032, so dass sich der Gesamtwiderstand - (im Sturzflug kann man ca = 0,1 setzen und den sich dazu einstellenden cw´ - Wert mit 0,013 annehmen) von 0,013 auf cw´ = 0,045 erhöht. Die Sturzflugendgeschwindigkeit vSZ end wäre dann nach obiger Formel bei p = 30 N/m², 33,0 m/s oder 118,8 km/h. Die Zeit t, die das Modell dazu benötigte ist 33 / 9,81 = 3,36 s und die dabei zurückgelegte Strecke s = 4,905 * 11,31 = 55,5 m. Als Probe für das Gewicht des Widerstandes bei der Sturzflugendgeschwindigkeit: W = cw´* v² * Ρ/2 * F = 0,045* 33,0² * 0,6125 * 0,5 = 15,0 N / 9,81 = 1,53 kp. Dem liegt eine Fläche von 0,5 m², ein Gewicht von 15 N und somit eine Flächenbelastung p von 30 N/m² zugrunde.
|
|
Zeichnung 4 zeigt die Geschwindigkeiten angetriebener Flugmodelle: darin ist vh = Horizontalfluggeschwindigkeit, vb = Bahnfluggeschwindigkeit und vst = Steigfluggeschwindigkeit, alle (m/s).
|
Zur Erinnerung: die aerodynamische Leistung der Luftschraube PP ist nicht mit der Motoren-Eingangsleistung identisch. Zwischen Beiden treibt nämlich die Wirkungsgradkette ihr böses Spiel. Der Gesamtwirkungsgrad errechnet sich beim Elektroantrieb durch Multiplikation der Wirkungsgrade von Akku, Regler, Motor, Getriebe und Luftschraube, also z.B.: 0,95 * 0.95 * 0,7 * 0,9 * 07 = 0,40 oder 40%. Diese Werte müssen im Einzelfall gemessen oder errechnet werden. Ergibt die am Akku gemessene Leistung (V * A) = 100 Watt, dann verbleiben für die Propellerleistung nurmehr PP = 40 Watt und dies ist bei Bürstenmotoren ein sehr guter Wert!
|
Bei der Steigfluggeschwindigkeit vst lässt man im Sprachgebrauch auch gerne das Wort Geschwindigkeit weg und spricht nur vom 'Steigen'. Sie ist schlicht und einfach der sekundliche Höhengewinn und hat, wie folgendes Beispiel zeigt, nichts mit der dabei zurückgelegten Strecke zu tun.
Fliegt ein Sportflugzeug mit einer Bahnfluggeschwindigkeit von 55 m/s und einem Steigen von 3 m/s, so ist der zurückgelegte Weg über Grund in 3 Sekunden 167 m und der Steigwinkel 3,1°. Das Flugmodell legt in der gleichen Zeit bei einer Bahnfluggeschwindigkeit von 8 m/s und ebenfalls 3 m/s Steigen lediglich 24 m zurück, jedoch bei einem Steigwinkel von 22 °!
Die erforderlich Propellerleistung PP (Watt) für den Steigflug ist Gewichtskraft N mal der Steigfluggeschwindigkeit vst plus der noch zu überwindenden Sinkgeschwindigkeit vy des Flugmodells. PP = N *(vst + vy). Nach Umstellen auf vst lautet die Steigflugformel:
vst = PP / N - vy (m/s)
Darin ist PP die Nettoleistung des Propellers in Watt, N das Gewicht des Modells in Newton (kg * 9,81) und vy die Sinkgeschwindigkeit in m/s.
|
Wieder ein Berechnungsbeispiel: die Propellernettoleistung beträgt 20 Watt, das Gewicht des Modells 5 Newton und die Sinkgeschwindigkeit 0,4 m/s, dann ist vst = 3,6 m/s.
|
Etwas schwieriger gestaltet sich die Formelableitung bzw. Berechnung der Horizontalfluggeschwindigkeit vh.
Fällt bei einem Motormodell der Vortrieb weg, würde es einem Segler gleich im Gleitflug allmählich Höhe verlieren. Soll nun das Modell im Kraftflug weder fallen noch steigen, ist gerade so viel Propellerleistung erforderlich, dass das Modell in jeder Sekunde um den sekundlichen Höhenverlust (vy) angehoben wird. Man nennt diesen Flugzustand geringsten Energiebedarfes Schwebeflug. An sich sind dabei die gleichen Voraussetzungen wie für die Steigfluggeschwindigkeit gegeben, außer, dass das Modell eben nicht steigen muß. Also fällt einfach aus der weiter oben angeführten Leistungsformel für den Steigflug PP = (vst + vy) vst heraus und man erhält für den Schwebeflug:
PP Schwebe = N * vy.
|
Als Beispiel: Gewichtskraft des Modells = 5 N und die Sinkgeschwindigkeit = 0,4 m/s, dann ergeben 5 * 0,4 = 2 Watt Schwebeleistungsbedarf am Propeller.
|
Wird die elektrische Leistung (W) mit V * A (Volt mal Ampere) dargestellt, so ist die mechanische Leistung = N * m/s (Arbeit pro Sekunde). Die Luftschraubenleistung wiederum ist das Drehmoment in Newton mal der Fluggeschwindigkeit in m/s. Man schreibt einfach: PP = Z * v mit Z als Zugkraft und v der Fluggeschwindigkeit. Nach der allgemeinen Mechanik (Kräftepolygon) ergibt sich für den Horizontalflug, dass Z auch gleich W (Widerstand) ist, siehe auch Abbildung 5. Daher folgt: PP = W * v. Setzt man für den Widerstand W in diese Gleichung dessen Formel ein: W = cw * ρ/2 * F * v², ergibt sich für die Geschwindigkeit des Horizontalfluges vh nach auflösen der Gleichung nach v:
vh = ³√ PP / (ρ/2 * F * cw´) (m/s)
|
Für ein Rechenbeispiel werden die Werte: PP = 20 Watt, Luftwert (Rho Halbe) = 0,6125, F = 0,3 m² und cw = 0,06 eingesetzt. Dann ist vh = ³√20 / (0,6125 * 0,3 * 0,06) = 12,2 m/s.
|
 |
Eine ganz knifflige Angelegenheit ist die Bahnfluggeschwindigkeit vb. Sie ist die auch in Abbildung 4 gezeigte, von der horizontalen Flugbahn mehr oder weniger abweichende, also steigwinkelabhängige Geschwindigkeit. Leider ist sie für die Propellerberechnung von besonderer Bedeutung. Dort geht es beim wichtigen, so genannten Fortschrittsgrad, um den Quotienten aus Bahnfluggeschwindigkeit des Modells durch Umfangsgeschwindigkeit der Luftschraube.
Beim Versuch, eine brauchbare Formel für vb zu finden wurde ein Vielfaches an Material der klassischen Literatur und von Arbeiten namhafter Autoren durchgearbeitet, als für den übrigen Teil dieser Arbeit. Zu unterschiedlich und daher auch unbefriedigend waren die Lösungsansätze und Ergebnisse. Aus der Quintessenz wurde schließlich eine Graphik erstellt, die einen weiten Bereich von vb abdeckt.
Aus Zeichnung 5 ist ersichtlich, dass bei einem Motormodell, dessen Zugkraft Z gleich der Gewichtskraft G entspricht, sich im Horizontalflug Gewicht G und Auftrieb A die Waage halten. Dies gilt auch für den Widerstand W und die Zugkraft Z. W erreicht dabei seinen Höchstwert (linkes Modell).
Mit zunehmendem Steigflug und Winkeln kommen A und W sozusagen durch die Werte G1 und G2 immer mehr ins Hintertreffen. Die Zugkraft Z und die Gewichtskraft G bleiben ja auf allen Flugbahnen unverändert. Auch die Bahngeschwindigkeit vb wird immer geringer, weil G immer mehr zur Zugachse einschwenkt und an Z zerrt und die zum Tragen nötige Hilfe von A zunehmend kleiner wird (die zwei mittleren Modelle), bis der senkrechte Stillstand erreicht ist. Auftrieb und Widerstand sind jetzt gleich Null. Das Modell verweilt im senkrechten Schwebeflug*. Nochmals: nur bei Z gleich G!
|
Ist jedoch die Zugkraft Z stärker als die Gewichtskraft G, ist das Modell in der Lage, senkrecht gegen den Himmel zu fliegen.
|
Ist die Zugkraft Z geringer als die Gewichtskraft G, ist der Steigflug nurmehr unter einem bestimmten Winkel möglich und das Modell kommt vor Erreichen der 90° - Lage in den, auch in der Großfliegerei gefürchteten Überziehflugzustand und schmiert noch vor Erreichen des Stillstandes ab.
In Zeichnung 6 sind drei Flugbahnkurven von Modellen gleichen Gewichtes aber unterschiedlicher Steigleistungen aufgetragen. Es ist gut erkennbar, dass sich von kleiner zu großer Steigleistung eine Verschiebung nach rechts und nach oben ergibt und irgendwo auf diesen Kurven, auch der höchst erreichbare, daher optimale Punkt liegt.
|
|
|
Ergänzungsbeitrag zum „Steigflug/Bahnflug“ / 2015
Bei angetriebenen Flugmodellen dürfte mit der Steiggeschwindigkeit vSt und eventuell noch mit der Horizontalgeschwindigkeit vH, der Wissensdurst des Alltagsmodellfliegers über die Fortbewegungstempi seines Fluggerätes gestillt sein. Die im Hauptbeitrag schon behandelte Bahngeschwindigkeit und ihr Energiebedarf sind jedoch so komplex, dass eine weitere ausführlichere Darstellung der Zusammenhänge nachträglich erforderlich schien.
Schon beim geringsten Steigen, also ab 1 Grad, geht das Modell von der Horizontalgeschwindigkeit vH = 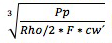 [m/s] (1) in die Steiggeschwindigkeit vSt = PP/G-vy [m/s](2), aber auch in die angesprochene Bahnfluggeschwindigkeit vB über (siehe mittlere Modelle in Zeichnung 5 des Hauptbeitrages). [m/s] (1) in die Steiggeschwindigkeit vSt = PP/G-vy [m/s](2), aber auch in die angesprochene Bahnfluggeschwindigkeit vB über (siehe mittlere Modelle in Zeichnung 5 des Hauptbeitrages).
Die Leistungsmöglichkeit all der genannten Geschwindigkeiten wird im Wesentlichen vom Leistungspotential des Antriebes sowie des Fluggewichtes bestimmt. Fliegt ein bemanntes Sportflugzeug mit einem Steigen von 3 m/s und einer Bahnfluggeschwindigkeit von 55 m/s, beträgt der in 3 Sekunden zurückgelegte Weg über Grund 164,75 m und der Steigwinkel 3,12°. Das Flugmodell hingegen legt in der gleichen Zeit bei ebenfalls 3 m/s Steigen und einer Bahnfluggeschwindigkeit von 8 m/s lediglich 22,2 m über Grund zurück, jedoch unter einem Steigwinkel von 22 °!
Wie aus (2) ersichtlich, benötigt man zur Berechnung der Steiggeschwindigkeit vSt die Propellerleistung PP, das Modellgewicht G und die von der Bahngeschwindigkeit vB abhängige Sinkgeschwindigkeit vy. Dem interessierten Modellflieger verrät vSt lediglich, welche Höhe das Modell pro Sekunde erreichen kann, nicht aber, unter welchem Steigflugwinkel α. Und noch einen Haken hat die Formel (2), nämlich den der Bestimmung der Variablen vy, denn ohne Modell-Leistungstabelle wäre die Einzelberechnung dieses Terms ein langwieriges Unterfangen.
Steigflugwinkel α und das ominöse vy umfassen nun das Hauptthema dieses Nachtrags. Die abzuziehende Sinkgeschwindigkeit vy ist die, die sich auch im antriebslosen Flug, also bei der Gleitgeschwindigkeit vx, zu jeweils gleicher Bahngeschwindigkeit vB, einstellt. Aus der Flugmodell-Leistungstabelle ist klar ersichtlich, dass vx und vy bei hohen Profil- und Gesamtwiderstands-Grundbeiwerten ca und cw, am geringsten sind. Werden diese Grundwerte kleiner, erhöhen sich in gleicher Weise vx und vy. Das Modell fliegt und sinkt schneller. Will man den Steigflugwinkel α bestimmen, ist es zunächst erforderlich, die Schwester der Steiggeschwindigkeit vSt, die Bahngeschwindigkeit vB zu ermitteln.
Um eine errechnete Steighöhe vSt (2) auch zu erreichen, muss das Modell unter einem ganz bestimmten Steigflugwinkel a steigen. Ist dieser zu flach, fliegt es zu schnell und schießt über das Höhenziel hinaus. Ist der Steigwinkel zu groß, wird das Modell zu langsam und auch in diesem Fall ist es ihm nicht möglich, in der Sollzeit die Sollhöhe zu erreichen. Für den Wettbewerbsflieger, dessen Motorlaufzeit begrenzt ist und dessen Propellerleistung nicht zu einem senkrechten Steigflug ausreicht, ist das Wissen um den optimalen Steigwinkel aber unerlässlich, vergibt er doch mit jedem Grad mehr oder weniger Abweichung davon, das Erreichen der optimalen Flughöhe und damit das Erreichen optimaler Gesamtflugzeiten. In welcher Geschwindigkeit und Zeiteinheit sich das Modell auf diesem Weg fortbewegt, wird als Bahngeschwindigkeit vB bezeichnet.
Um für die gängigsten Modellvarianten, also für alle nur möglichen Steiggeschwindigkeiten zwischen 0 und 90 Grad die Bahngeschwindigkeit vB schnell zu ermitteln, fand der Autor für die Bestimmung des optimalen Steigflugwinkels a eine Hilfsformel. Sie gilt für alle Verhältniszahlen aus PP/G von 1 – 9,81 und lautet: sina = PP/G*8,4 [°] (3). Dazu 2 Kontrollbeispiele: bei einem ganz schwach motorisierten, leichten Motorsegler beträgt das PP/G-Verhältnis 7,0 W/3,0 N = 2. Mit 8,4 multipliziert, ergibt das Produkt 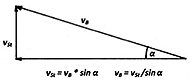 einen Steigflugwinkel von 16,8°. Weil nun im rechtwinkeligen Flugdreieck vB = vSt/sina ist, stellt sich bei einer errechneten Steigrate vSt von 1,73 m/s (P/G-vy) und der gemessenen Bahngeschwindigkeit vB von 6,0 m/s (100m in 16,5 s), nahezu der gleiche Bahnneigungswinkel ein. 1,73/6 = 0,2883. Davon ist der arc sin = 16,76°. einen Steigflugwinkel von 16,8°. Weil nun im rechtwinkeligen Flugdreieck vB = vSt/sina ist, stellt sich bei einer errechneten Steigrate vSt von 1,73 m/s (P/G-vy) und der gemessenen Bahngeschwindigkeit vB von 6,0 m/s (100m in 16,5 s), nahezu der gleiche Bahnneigungswinkel ein. 1,73/6 = 0,2883. Davon ist der arc sin = 16,76°.
Aus der Datentabelle dieses Modells mit vB = 6,0 m/s, ist ca = 0,6 und cw´ = 0,037. Die daraus resultierende, abzuziehende Sinkgeschwindigkeit = 0,35 m/s.
Beispiel 2: Eine Propellerleistung von 100 W, dividiert durch das Modellgewicht von 10 N mal 8,4, ergibt einen Steigwinkel von 84°. Der Sinus davon ist 0,9945. Der aus der Leistungstabelle des betreffenden Modells entnommene Wert für vy = 0,6 m/s, ergibt für vSt = 9,34 m/s. Daraus die Bahngeschwindigkeit vB = 9,34/0,9945 = 9,39 m/s. Die im Hundertstelbereich liegenden Ungenauigkeiten sind in der Flugpraxis nicht von Bedeutung, beginnt doch der senkrechte Steigflug „optisch“ schon bei 75°.
Bei obiger Bahngeschwindigkeit vB von 9,39 m/s, zeigt die Leistungstabelle: ca = 0,63, cw´= 0,04 und die daraus resultierende, abzuziehende Sinkgeschwindigkeit vy = 0,6 m/s. Mit zunehmender Steiggeschwindigkeiten und höheren Flächenbelastungen wächst die abzuziehende Sinkgeschwindigkeit vy beträchtlich (bei vSt = 15 m/s ist vy = -2,25, Profil Eppler 205).
Bei einem Leistungs/Gewichtsverhältnis von PP/G = 10,7*8,4 = 90 Grad, geht die Bahngeschwindigkeit vB in den senkrechten Steigflug über, oder wie kürzlich geschrieben stand, beginnt hier „Der ganz normale Wahnsinn“. Siehe dazu: www.F5B.de.
Hier sei auch nochmals auf die Berechnungsmöglichkeit einer besonderen Bahngeschwindigkeit vB hingewiesen, bei der die dafür erforderliche Propellerleistung gleich der Gewichtskraft ist. Diese Konstellation tritt dann ein, wenn das Modellgewicht G mit der halben Erdanziehungskraft g multipliziert wird, als Formel: PP0 = G*g/2 [W] (4). Nur mit dieser Leistung erreicht das Modell die Fluglage, welche zum senkrechten Stillstand oder vertikalem Schwebeflug führt. Das Modell steht senkrecht, es hovert oder torqut. Daraus folgt: Um mit Modellen höherer Motorleistung als PP0 (4) Torquen zu können, wie dies bei Kunstflugmodellen der Fall ist, muss die Luftschraubenleistung PP so weit gedrosselt werden, bis sie zu PP0 wird. Bis auf die abzuziehende Sinkgeschwindigkeit vy entspricht dies dann einem PP/G-Verhältnis von 4,905, oder auch der Gesamtleistung aller Propeller eines Copters im Schwebeflug.
Was muss vor der Leistungsbestimmung eines E-Flugmodells bestimmt werden?
Das Gesamtgewicht in N (1 kg = 9,81 N), die Propellerleistung PP (W), die Flügelfläche F (Grundriss) in m² (40 dm² = 0,4 m²), die Flächenbelastung G/F und für Rho/2 = 0,60205. Schließlich aus dem Leistungsblatt (falls vorhanden, ansonsten Schätzwert einsetzen) das zu vB passende vy.
Um den Gesamtwirkungsgrad des Antriebes zu finden ist es erforderlich, dessen Einzel-Wirkungsgrade zu ermitteln. Die Betriebs-Motoreingangsleistung in Watt (Volt * Ampere) liest man am einfachsten aus einem Logger ab. Eine großartige Hilfe ist hier auch der Drive Calculator www.drivecalc.de. Gibt man u. a. Akkuspannung und Motortype ein, wird nicht nur der Motorwirkungsrad angezeigt, auch die zum Motor passende optimale Luftschraube kann gewählt werden. Deren Wirkungsgrad kann mit guter Annäherung aus dem H/D-Verhältnis und dem Fortschrittsgrad J der Luftschraube ermittelt werden (siehe dazu Beitrag „Die verflixte Luftschraubenanpassung“, www.czepa.at). Sind die Wirkungsgrade für den Motor 0,8, Getriebe 0,9, Luftschraube 0,75, folgt daraus: 0,8*0,9*0,75 = 0,54. Dann liegt der Gesamtwirkungsgrad des Antriebs bei 54 %. Bei einer Motoreingangsleistung von 100 Watt, beträgt dann die Propellerleistung PP = 100 * 0,54 = 54 Watt.
Zum Luftschraubenwirkungsgrad: Nur große Durchmesser, höhere Werte von H/D (Verhältnis Steigung zu Durchmesser) sowie niedrige Drehzahlen (Getriebe) versprechen gute Wirkungsgrade bis 80%. Kleine Durchmesser und hochdrehende, Strom fressende Heuler verringern nicht nur die Flugdauer, sie setzen auch die Propellerleistung allein bis 60% herab, martern das Triebwerk bis zur Schmelze und beleidigen den Gehörsinn.
Die im Ergänzungsbeitrag 2015 verwendeten Abkürzungen der physikalischen Größen und Dimensionen in alphabetischer Reihenfolge:
| Ca und cW´= Auftriebs- und Gesamt-Widerstandsbeiwert [0] |
? (Rho) = Luftdichte [kg/m³] hier 1,2041 |
| F=Flügelfläche [m²] |
sinα = Steigwinkel [°] |
| G = Modellgewicht [N] |
vB = Bahngeschwindigkeit [m/s] |
| P = Flächenbelastung |
vH = Horizontalgeschwindigkeit [m/s] |
| g = Erdbeschleunigung [9,81 m/s²] |
vSt = Steiggeschwindigkeit [m/s] |
| N = Newton |
vy = Sinkgeschwindigkeit [m/s] |
| PP0 = Torque-Propleistung [W] |
Κ (Kappa) = Steigzahl |
| PP = Propellerleistung [W] |
|
Eckige Klammern [ ] beinhalten die Dimensionen. Runde Klammern ( ) beziehen sich auf Nebenerklärungen oder geben mit einer Ziffer (1) die Reihenfolge der hier verwendeten Formeln an. Als Nebenformeln seien genannt: Gleitfluggeschwindigkeit vx = (5), Sinkgeschwindigkeit vy = (6).
Der Ausdruck (mit gezogener Wurzel cw /ca1,5) ist als Steigzahl k bekannt. Je größer ihr Wert ist, umso schneller ist die Fluggeschwindigkeit vx und umso höher die Sinkgeschwindigkeit vy. Eine Verdopplung von G/F würde übrigens vx wie auch vy um jeweils 41 % erhöhen.
|
| Erstveröffentlichung: Zeitschrift prop 6/1997
|
|
|
